

آنچه در ادامه خواهید خواند!
هواگرد عمود پرواز

هواگرد عمودپرواز به هواگردی گفته میشود که میتواند بدون نیاز به باند فرود و برخاست، به صورت عمودی برخاست و نشست کند. این دستهبندی میتواند انواع مختلفی از هواگردها، از جمله بالگردها و همچنین هواگردهای ثابت با قدرت کنترل رانش و سایر هواگردهای هیبریدی با روتورهای قدرتی مانند سیکلوژیروسها/سیکلوکوپترها و جیرودینها را شامل شود.
برخی از هواگردهای عمودپرواز میتوانند در حالتهای دیگر نیز عمل کنند، مانند CTO (برخاست و نشستن معمولی)، STOL (برخاست و نشستن کوتاه) یا STOVL (برخاست کوتاه و نشستن عمودی). برخی دیگر مانند بالگردها فقط میتوانند به صورت VTOL عمل کنند، زیرا هواگردها فاقد چرخهای فرود برای تاکسی هستند. VTOL یک زیرمجموعه از V/STOL (برخاست و نشستن عمودی یا کوتاه) است.
برخی از هواگردهای سبکتر از هوا (lighter-than-air) نیز به عنوان هواگردهای عمودپرواز شناخته میشوند، زیرا میتوانند با پروفایلهای عمودی برخاست و نشست کنند و در هوا معلق شوند.
هواگردهای عمودپرواز برقییا (eVTOL) نیز همراه با فناوریهای کنترل پرواز خودکار و تحرک به عنوان یک سرویس (MaaS) یا برای امکانپذیری تحرک هوایی پیشرفته (AAM)، در حال توسعه هستند که میتواند شامل خدمات تاکسی هوایی درخواستی، تحرک هوایی منطقهای ، حمل و نقل بار و وسایل نقلیه هوایی شخصی یا (PAV) باشد.
علاوه بر بالگردهای ubiquitous، در حال حاضر دو نوع هواگرد عمودپرواز در خدمات نظامی وجود دارند: هواگردهای تیلتروتور (tiltrotor) مانند Osprey V-22 Boeing Bell و هواپیماهای کنترل رانش مانند خانواده Harrier و هواپیمای جدید (JSF) Fighter Strike Joint II Lightning .F-35B . در بخش غیرنظامی در حال حاضر فقط بالگردها به صورت عمومی استفاده میشوند (برخی از انواع دیگر هواگردهای عمودپرواز تجاری پیشنهاد شدهاند و از سال 2017 در حال توسعه هستند).
به طور کلی، هواگردهای عمودپرواز که قابلیت استفاده از STOVL دارند در هر جایی که ممکن باشد از آن استفاده میکنند، زیرا به طور معمول وزن برخاست، برد یا بارگیری بیشتری نسبت به هواگردهای عمودپرواز دارند.
کاربردها
- نظامی: عملیات تهاجمی، شناسایی و ترابری.
- غیرنظامی: حمل و نقل شهری (مانند تاکسی هوایی)، امداد و نجات، و نظارت.
انواع هواگردهای عمود پرواز
1. هواگردهای جت VTOL : این هواگردها از موتورهای جت برای برخاست و فرود عمودی استفاده میکنند. نمونهها:

- هریر جامپ جت (Harrier jump jet) یکی از معروفترین هواپیماهای جنگی VTOL میباشد.

- F-35BLightning II : نسخه VTOL از جنگنده چندمنظوره F-35 است.

- Yakovlev Yak–38 : هواپیماهای عمودپرواز روسی برای ناوهای هواپیمابر است.
2. هلیکوپترها: هلیکوپترها از پرههای اصلی برای بلند شدن و فرود عمودی استفاده میکنند. نمونهها:

- UH-60 Black Hawk : هلیکوپتر نظامی چندمنظوره است.

- CH-47 Chinook : هلیکوپتر ترابری با دو روتور است.

- AH-64 Apache : هلیکوپتر تهاجمی است.
3. هواپیماهای تیلتروتور (Tiltrotor):پرههای این هواگردها میتوانند بین حالت عمودی (برای برخاست/فرود) و افقی (برای پرواز به جلو) تغییر کنند. نمونهها:

- V-22Osprey: ترکیبی از ویژگیهای هواپیما و هلیکوپتر میباشد.

- Bell V-280 Valor:یک تیلتروتور نسل جدید برای کاربردهای نظامی است.
4. هواپیماهای تیلتوینگ: در این نوع، تمام بال (به همراه ملخها) میچرخد تا هواگرد بتواند بین حالت عمودی و افقی تغییر وضعیت دهد. نمونهها:

- یک نمونه آزمایشی کانادایی است.

- 142–LTV XC:هواپیمای تیلتوینگ نظامی ایالات متحده میباشد.
5. هواپیماهای کانورتیبل روتور (Convertible Rotor): روتورهای آنها میتوانند بین حالت هلیکوپتر و هواپیما تغییر کنند. نمونهها:

- Fairey Rotodyne: نمونهای از یک کانورتیبل روتور بریتانیایی میباشد.
6. پهپادهای عمودپرواز( VTOL UAVs):پهپادهایی که توانایی برخاست و فرود عمودی دارند و معمولاً برای کاربردهای نظامی یا غیرنظامی استفاده میشوند. نمونهها:

- MQ-8 Fire Scout : پهپاد VTOL نظامی است.

- DJI Mavic 3 :یک پهپاد تجاری است.
7. هواگردهای پرنده با ملخ چندگانه (Multicopter) :این نوع از چندین ملخ کوچک برای برخاست و پرواز استفاده میکنند و بیشتر در پهپادها کاربرد دارند. نمونهها:

- eVTOLs : مانند پرندههای شهری الکتریکی برای حمل و نقل است.

- Joby Aviation S4 : یک نمونه eVTOL برای حمل مسافر است.
8 . هواپیماهای جت/ملخی ترکیبی: این دسته شامل هواگردهایی است که از ترکیب جت و ملخ برای هواپیماهای عمودپرواز استفاده میکنند. نمونهها:

- Dornier Do 31:هواپیمای VTOL آلمانی
چالشهای طراحی در هواپیماهای عمود پرواز
این مقاله به بررسی استراتژیهای کنترلی مختلف و راهحلهایی برای غلبه بر چالشهای طراحی میپردازد و در نتیجه، طراحی هواپیماهای عمودپرواز کارآمدتر برای شرایط مختلف را توصیف میکند.
برای درک بهتر، چالشهای مختلف طراحی در هواپیماهای عمودپرواز به صورت جدول ارائه شدهاند. این جدول تکنیکهای مختلفی را در شرایط گوناگون نشان میدهد که برای غلبه بر چالشهای طراحی استفاده شدهاند. یافتهها نشان میدهد که بیشتر مطالعات برای غلبه بر این چالشها از بهینهسازی گروهی در تکنیکهای محاسباتی، روشهای نوآورانه در حالت شناوری، استراتژیهای کنترل مبتنی بر کنترلر PID، اتوماسیون ترکیبی و واحد اندازهگیری اینرسی (IMU) یا (Unmanned aerial vehicle)برای مدیریت حالتهای انتقال به جلو و عقب استفاده میکنند.طراحی هواگردهای عمودپرواز بر اساس پروفایل مأموریت، اندازه، پایداری (Inertial measurement unit)هواگرد در حین پرواز و همچنین نوع طراحی که انتخاب میشود؛ طراحی تیلت روتور، بال ثابت (stability) یا تیلت وینگ و غیره است. طراحی VTOL عمدتاً شامل طراحی کامل مدل، طراحی مفهومی و طراحی مقدماتی است که این موارد از جمله ملاحظات اصلی در طراحی هر مدل هستند.
هر مدل طراحی بر اساس عوامل آیرودینامیک، کنترل ساختاری، پایداری، الکترونیک، پیشرانه و همچنین فرآیند ساخت مدل پایهگذاری میشود. تخمین وزن نقش بسیار مهمی در طراحی هواگردهای عمودپرواز دارد و ابعاد هواگرد نیز برای طراحی هر هواگردی اهمیت زیادی دارد. فرآیند طراحی ابتدا با انتخاب فرم بال و نسبت ابعاد بال آغاز میشود و سپس به نسبت ابعاد بدنه و طراحی بدنه میرسد. این نسبت ابعاد بال و شکل آن، بر اساس نوع مأموریت تعیین میشود.
پس از اتمام طراحی بر اساس تمامی این پارامترها، تحلیل ساختاری اهمیت زیادی دارد تا تحلیل جریان و تحلیل ساختاری هواگرد بررسی شوند. در طراحی پهپادها، تعیین ابعاد و هزینه پهپاد از مهمترین بخشها هستند، زیرا ابعاد باید با دقت بالا تعیین شوند و هزینه باید حداقل ممکن باشد.
به دلیل اینکه تمامی ویژگیهای هواگرد باید در حجمی کوچک گنجانده شوند، طراحی و ساخت این مدلها با چالشها و پیچیدگیهای زیادی همراه است. قانون عدد رینولدز (Wing Fixed) پایین که به دلیل اندازه کوچک و سرعت پایین این هواگردها به وجود میآید، یکی از مشکلات اصلی در ساخت این مدلها محسوب میشود.
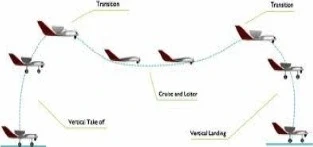
شکل 1: پروفایل مأموریت VTOL
چالشهای طراحی در طراحی بالگرد چرخشی
کاهش اندازه و وزن هواگرد، یکی از چالشهای اصلی در طراحی بالگرد است. یکی از معایب اصلی این مفهوم مصرف برق توسط موتورها است زیرا در سرعتهای بالا و پایین پرواز میکند و پرواز در حالت شناور (ROTARY_WING) نیز عمدتاً با این نوع پهپاد انجام میشود. این طراحی بر اساس موقعیت موتورها و همچنین تعداد موتورها انجام میشود. این پهپادها قابلیت برخاست و فرود عمودی همراه با توانایی شناور ماندن در هوا را دارند و همچنین براساس وزن طراحی میشوند زیرا این معیار مهمی است و آنها قابلیت مانوردهی دارند.
این طراحی بر اساس موقعیت موتورها و همچنین تعداد موتورها شکل میگیرد. این پهپادها علاوه بر قابلیت برخاست و فرود عمودی، از قابلیت پرواز در حالت شناور نیز برخوردار هستند. طراحی این هواگردها به وزن آنها وابسته است، چرا که وزن یکی از معیارهای مهم محسوب میشود. همچنین، این پهپادها از قابلیت مانورپذیری بالایی برخوردارند.
چالشهای طراحی تیلت وینگ و تیلت روتور
این نوع طراحی ترکیبی از مفهوم طراحی بال چرخان (Hovering flight) و بال ثابت (Rotary Wing) است. این دو طراحی چالشهای مشابهی دارند، اما چالش اصلی در این طراحی مربوط به حالت انتقالی (Fixed Wing) است. در این حالت، هواگرد باید از حالت چندملخه (Transition Mode) به حالت جلو (Multicopter Mode) و عقب (Front Transition) تغییر وضعیت دهد، که این تغییرات نیازمند استراتژیهای کنترلی متفاوتی برای پرواز این نوع هواگرد است.
نمونههایی از طراحی تیلت روتور که ساخته شدهاند عبارتند از 6 Firefly و .E-Flite Convergence. برخی دیگر از هواگردها مانند Bell Eagle-Eye و Birutan نیز دارای مکانیزم تیلت روتور هستند که عملکرد فوقالعادهای ارائه میدهند. این هواگردها توانایی پرواز عمودی را دارند و قابلیت تغییر در حمل و نقل هوایی از طریق عملکرد برخاستن و فرود عمودی را ارائه میدهند. این هواگردها به دلیل برخورداری از مکانیزم تیلت روتور معمولاً در هواپیماهای نظامی استفاده میشوند. آنها در حالت هواپیما (Autopilot) در سرعتهای بالا و در حالت چندملخه در سرعتهای پایین به کار میروند. روشهای مختلفی برای اجرای مانورهای انتقالی خودکار ارائه شده است که در آن E-Flite و Firefly موفق به انجام این انتقالها به صورت خودکار شده و عملکرد موفقیتآمیزی داشتهاند.
چالشهای طراحی پهپاد بالثابت
به طور کلی در طراحی پهپادهای بال ثابت چالشهای اصلی شامل انتخاب شکل بال، ابعاد هواگرد، نسبت ابعادی برای بیشینه پایداری پروازی (endurance aspect ratio for maximum) و تخمین وزن میباشد. در اینجا نسبت پیشرانش به وزن باید بیشتر باشد، این پهپادها نمیتوانند به آرامی پرواز کنند و نمیتوانند در هوا شناور بمانند؛ اینها سادهترین انواعی هستند که برای طراحی و ساخت توسعه یافتهاند. بسته به مأموریت، پهپادها دارای ارتفاع، پایداری (endurance)و سرعت پروازی متفاوتی هستند. این پهپادها هنگام پرواز بر روی آب و همچنین در اطراف جنگلها با سرعت بالایی پرواز میکنند. نسبت بالابر (lift) به پسا (drag) بیشتر است و کاهش در عدد رینولدز وجود دارد. به دلیل کاهش سرعت و ابعاد، عدد رینولدز و همچنین بازده کاهش مییابد. بسیاری از پژوهشگران از روش آزمون و خطا در طراحی این نوع پهپادها استفاده کردهاند، اما طراحی آنها به دلیل اندازه، وزن و… بهینه محسوب نمیشود.
راهحل پیشنهادی برای چالشهای طراحی
برای غلبه بر این چالشها، فرآیند طراحی پهپادها باید بر اساس پیکربندی و روششناسی طراحی انجام شود. برای تمام نقاط ضعف روشهای قبلی، میتوان راهحلهایی با استفاده از روشهای آماری، نظری، الهامگرفته از طبیعت و جامع پیدا کرد. این روشها باید برای طراحی بالهای سبکوزن، قابلحمل، با قابلیت عملیاتی آسان و نیاز به فضای ذخیرهسازی کم برای تمامی پهپادها در هنگام طراحی هر مدل در نظر گرفته شوند. اخیراً بسیاری از چالشهای طراحی به دلیل الهامگیری از طبیعت، موجودات دریایی و غیره برطرف شدهاند.
فناوریهای آینده
به طور قطع دنبال کنندگان صنعت هوانوردی تا به حال با اهمیت پرندههای عمودپرواز آشنا شدهاند. بخشی از صنعت حمل و نقل درون شهری در آینده نزدیک از زمین به هوا منتقل میشود و پیشتازان این صنعت اکنون در حال دست و پنجه نرم کردن با چالشهای این حوزه هستند. در این قسمت، شرکت Aviation Joby، یکی از پیشتازان طراحی و ساخت پرندههای عمود پرواز که سابقه همکاری با ناسا را در رزومه خود دارد معرفی میکنیم.
معرفی
شرکت Aviation Joby به مانند سایر شرکتهای فعال در عرصه هوانوردی در تلاش است تا فعالیتهای اصلی این شرکت در حالهای از ابهام باقی بماند و از طرحهای این شرکت اطلاعاتی درز پیدا نکند. با این حال در ماههای گذشته با آشکار شدن تصویر پرنده عمودپرواز سرنشیندار این شرکت بخشی از فعالیتهای آن و سرمایهگذاریهای این شرکت پیشرو آشکار شد. تصویر منتشر شده که در زیر میبینید خبر از طراحی و ساخت یک هواپیمای عمودپرواز درون شهری را میدهد که با دارا بودن 6 موتور الکتریکی قابلیت حمل 5 مسافر را دارد.

ارزش این شرکت با پیوستن سرمایهگذارها و مشارکت در این طرح به بیش از 1 میلیارد دلار رسیده است و اینچنین به یک استارتاپ موفق که به صورت مستقل در این حوزه فعالیت میکند تبدیل شده است.
نقطه آغاز
برای دانستن نقطه آغاز این موفقیت باید به صحبتهای JoeBen Bevirt مدیرعامل و موسس این شرکت که به تازگی برنده جایزه انجمن عمودپرواز شده است رجوع کرد. او در این سخنرانی از سرمایهگذاری بر روی موتورهای الکتریکی از حدود 10 سال پیش سخن گفت. Bevirt بعد از فارغالتحصیلی در دانشگاه استنفورد پژوهش بر روی باتریهای مناسب برای هواپیماهای عمود پرواز را شروع کرد. زمانی بیشینه ظرفیت باتریها 40 W-h/Kg بوده ولی امروز این ظرفیت در حال رسیدن به 200 W-h/Kg است و این بدان معناست که تحقق پروازهای درون شهری رنگ و بوی واقعیتری به خود خواهد گرفت.
او در سال 2006، یک شرکت به نام Joby که خود ملقب به این نام بود، راه اندازی کرد و به ساخت هولدرهای گوشی موبایل و دوربین عکاسی پرداخت. در سال 2008 با راه اندازی Joby Energy فعالیتهای خود در صنعت هوانوردی را ادامه داد. در این شرکت به ساخت یک گلایدر سرنشیندار پرداخت و طی یک سال فعالیت این شرکت تجربیات زیادی در زمینه موتور الکتریکی، ملخ و سازه کامپوزیتی سبک بدست آورد. او که همیشه شعار کاهش زمان سفرهای درون شهری را در ذهن داشته، به دنبال حل چالش تقابل هزینه و تکنولوژی بوده است و برای این منظور پرندههای کوچک متعددی را ساخته و به مرحله تست رسانده است.
رشد و توسعه
در سال 2008 کمپانی Joby Aviation به صورت رسمی آغاز به کارکرد و اولین محصول آن Monarch نام داشت یک هواپیمای شخصی فوق سبک که به هواپیماهای امروزی نزدیک بوده با این تفاوت که قابلیت نشست و برخاست عمودی را داشت. درآن سالها همچنان مشکلات ظرفیت کم باتری وجود داشت بنابراین در این مدل پرنده نیز از سوخت مایع در کنار باتری برای تأمین انرژی 8 موتور الکتریکی آن استفاده شدهاست. همانطور که در شکل زیر میبینید طول بال این پرنده 11 متر است و با سرعت کروز 160 km/h میتواند 1 ساعت مداومت پروازی داشته باشد.
با تکمیل شدن تیم طراحی و مطرح شدن ایدههای بهروزتر، این مجموعه با طراحی یک پرنده جدیدتر و متفاوتتر توانست هزینه هر مسافر به ازای هر مایل را کاهش دهد و امکان مسافرت هوایی درون شهری را در مرحله طراحی فراهم کند. این محصول که در سال 2014 از آن رونمایی شد S2 نام دارد که شکل آن را در زیر میبینید. این پرنده برای پروازی آرام اما ایمن در درون شهر طراحی شده است. در پرنده S2 از 12 موتور برای نشست و برخاست عمودی استفاده میشود که 4 عدد از آنها که در نوک بال و دم قرار دارند با گردش خود در فاز کروز نیز کمک خواهند کرد. علاوه بر این نیز 4 موتور به صورت ثابت برای فاز کروز طراحی شدهاند. سیاستگذاریهای این شرکت در پژوهش بر روی موتورهای الکتریکی و سیستم پیشرانش توزیع یافته همچنان ادامه داشت و منجر به همکاری با ناسا شد.
همکاری با ناسا
به موازات طراحی پرندههای عمودپرواز سرنشیندار خود، این کمپانی همکاریهایی را نیز با ناسا داشته است که منجر به رشد و توسعه بیشتر این شرکت شد. از جمله این پروژهها میتوان به طراحی پهپاد JobyLotus ، طراحی و ساخت موتور الکتریکی Maxwell X–57 و مشارکت در پروژه LEAPTech Wing اشاره کرد. LEAPTech که کوتاه شده عبارت Leading Edge Asynchronous Propeller Technology است؛ تنها یک بال بوده که با نیروی پیشران الکتریکی نامتوازن توریع شده بر روی آن قابلیت پرواز پیدا میکند. این بال فیبرکربنی 9 متری در سال 2015 ساخته شد و اولین تست پروازی خود را انجام داد. این بال با نصب بر روی یک کامیون و حرکت آن، سرعت اولیه لازم برای برخواست را پیدا میکند.

طراحی عمودپرواز
شرکت Joby Aviation با تجربیات بدست آمده از فعالیتهای خود در عرصه هوانوردی، توانست نسخه بهبودیافتهای به نام S4 را بسازد. این پرنده 4 نفره نسبت به نسخه قبلی خود دو نفر افزایش ظرفیت داشته و تعداد موتورهای آن به 6 عدد کاهش یافته است. همچنین پرنده S4 آلودگی صوتی کمتری ایجاد میکند و هزینه ساخت آن کمتر است که این موفقیتی بزرگ برای این شرکت است. بعد از منتشر شدن نخستین تصاویر این پرنده تمامی توجهات به آن جلب شد و مدیران این مجموعه با جذب سرمایه بیشتر به توسعه شرکت سرعت بخشیدند. از ویژگیهای این پرنده میتوان به سرعت کروز km/h480 و برد 240 کیلومتری آن اشاره کرد همچنین صدای تولید شده از این پرنده 100 برابر کمتر از صدای یک هلیکوپتر میباشد.
چشمانداز
نقطه اوج فعالیت های این شرکت را می توان امضای قرارداد همکاری با اوبر دانست. این قرارداد که در اوایل پاییز سال گذشته منعقد شد شرکت Joby را متعهد به ارائه سرویس تاکسی هوایی کرده که باید ایمن، بدون ایجاد آلودگی و سریع باشد همچنین ساخت و بهرهوری از این سیستم بر عهده این شرکت میباشد و در طرف مقابل شرکت اوبر قرار است زیرساخت های لازم را فراهم کند و به سیستم حمل و نقل زمینی خود متصل کند. با توجه به رویکرد این شرکت در سالهای اخیر و سرمایهگذاریها و مشارکتهای انجام داده تمرکز این شرکت بر روی ارائه سرویس حمل و نقل هوایی درون شهری است و همچنین بر روی بهینهسازی و بهبود پرنده خود میباشد و انتظار میرود که در سالهای آینده نام این شرکت به مراتب بیش از پیش شنیده شود و سهم بزرگی از صنعت حمل نقل هوایی در آیندهای نه چندان دور داشته باشد.
چشمانداز حمل و نقل هوایی در فضای شهری جت لیلیوم، پرنده الکتریکی

هر وسیله ای که بتواند در هوا پرواز کند، هوا گرد نام دارد. جت لیلیوم هوا گرد سبک و بدون خلبانی است که با 36 موتور الکتریکی و توان 320 کیلووات، قادر به پرواز و نشست و برخاست عمودی است، یعنی در دسته هوا گردهای eVTOL یا Electrical vertical take–off or landing جای میگیرد. لیلیوم دارای بالچههای دماغه (Canard) و 12 بالک (Flap) است که هر یک از این بالکها 3 موتور الکتریکی را در خود جای دادهاند. حرکت بالکها موجب تغییر جهت پرواز لیلیوم از حالت عمودی به افقی میشود، آنها هنگام برخاستن به طرف پایین و در پرواز، حالت افقی دارند و نیروی پیشرانش را در جهت مورد نیاز تامین میکنند. بیشینه وزن برخاست این هوا گرد 640 کیلوگرم، شامل 200 کیلوگرم وزن بار است. سرعت بیشینه آن 300 کیلومتر بر ساعت و برد آن نیز 300 کیلومتر است. این پرنده دم، ملخ و گیربکس ندارد. پروژه لیلیوم در سال 2015 در دانشگاه مونیخ کلید خورد و در 20 آوریل 2017 اولین پرواز موفقش را حوالی مونیخ انجام داد. کارگزاران پروژه لیلیوم قصد دارند تا سال 2025 آن را برای پرواز با 5 سرنشین و به عنوان تاکسی هوایی آماده کنند.
این پرنده اولین آزمون 5 نفرهاش را انجام داده که در واقع آخرین سری از آزمونهای موفق این مدل از هواپیماهای الکتریکی است. نگرش فعلی اینچنین است که پیشبینی میشود در دهه آینده ماشینهای پرنده را در شهرها ببینیم.
پرنده بدون خلبان بوئینگ

نمونه اولیه وسیله پرنده مسافربری خودکار بویینگ که توانسته است آزمون تیکآف و فرود خود را به خوبی پشت سر بگذارد نیز یک هوا گرد eVTOL محسوب میشود. شرکت فناوریهای نسل آینده بویینگ، NeXt که سازنده این وسیله پرنده است، تلاش میکند، حمل و نقل شهری را به سمت و سویی نو ببرد. آنطور که رییس واحد فناوری بویینگ میگوید، این شرکت توانسته است در یک بازه زمانی یکساله، نمونه مفهومی را به نمونه اولیه عملیاتی تبدیل کند. حمل و نقل هوایی همزمان به خلاقیت و ایمنی نیاز دارد. مهندسانی که این نوع وسایل پرنده عمود پرواز را طراحی میکنند، با چالش خاصی روبرو هستند:
چطور میشود فازهای افقی و عمودی پرواز هوا گردهای VTOL سریع را به یکدیگر تبدیل کرد؟
بویینگ NeXt در تلاش است به گونهای با قانونگزاران و شرکتهای مهم صنعت حمل و نقل هوایی تعامل کند که بتواند به واسطه وسایل پرنده خودکار و بدون خلبان، اکوسیستم جدیدی در حوزه حمل و نقل ایجاد کند.
تاکسی هوایی
شرکت اتوفلایت (AutoFlight) اولین پرواز بینشهری پرندههای عمودپرواز برقی خودران جهان را به انجام رساند. به گزارش ایسنا، شرکت اتوفلایت که یک توسعهدهنده پیشرو در صنعت هواپیماهای عمودپرواز برقی (eVTOL) است، با اولین پرواز خودران بینشهری تاکسی پرنده برقی خود، نقطه عطفی بزرگ در حمل و نقل هوایی و نوین شهری رقم زد.
به نقل از آیای، در این پرواز تنها 20 دقیقه طول کشید تا فاصلهای که پیمایش زمینی آن سه ساعت طول میکشد، طی شود.

آزمایش تاکسی هوایی
این پرواز نمایشی مسافت 50 کیلومتری بین شهرهای شنژن و ژوهای در چین را طی کرد و همانطور که گفتهشد، تنها 20 دقیقه طول کشید که کاهش قابل توجهی نسبت به سه ساعت رفت و آمد معمولی در حمل و نقل زمینی را نشان داد.
تاکسی پرنده پنج نفره شرکت اتوفلایت موسوم به پراسپریتی (Prosperity) نشاندهنده مهارتهای فنی این شرکت است. این نمایش موفق بر قابلیتهای این پرنده و حمایت فزاینده فرمانداران منطقه از توسعه پرندههای عمودپرواز برقی تأکید میکند.
گفتنی است که فرانک استیونسون (Frank Stephenson) طراح معروف که برای برندهایی مانند مینی، فیات، فراری، مکلارن و مازراتی کار کرده است، پراسپریتی را طراحی کرده است.
تیان یو (Tian Yu) بنیانگذار و مدیر عامل اتوفلایت از نمایش قابلیتهای پراسپریتی در طول این پرواز نمایشی بین شهری ابراز هیجان کرد.
وی میگوید این شرکت در حال برنامهریزی برای همکاری با مقامات محلی و شرکایی از سراسر جهان است و هدف آن این است که گزینههای پرواز تاکسیهای پرنده عمودپرواز برقی را برای شهرهای سراسر جهان ایمن، کارآمد، پایدار و مقرون به صرفه کند.
به گفته وی، دولت چین قصد دارد اصطلاحا اقتصاد کم ارتفاع را توسعه دهد و راهبرد آن این است که هزاران ایستگاه و صدها مسیر هوایی تاکسیهای پرنده عمودپرواز برقی در سراسر منطقه خلیج بزرگ در جنوب چین از جمله مسیر بین شنژن و ژوهای احداث کند.
سناریوهای کاربردی در این موضوع شامل حمل و نقل مسافر، گردشگری، تدارکات و خدمات اضطراری است. در کوتاه مدت، برنامههایی برای دستیابی به 300 هزار پرواز در این منطقه در سال در حال تدوین است.
یکی از شرکای اتوفلایت، یک شرکت هواپیمایی عمومی و ارائه دهنده خدمات بالگرد در چین موسوم به هلی-ایسترن (Heli–Eastern) است که با خرید 100 فروند تاکسی پرنده پراسپریتی موافقت کرده است. این تاکسیهای پرنده در مسیرهایی مانند مسیری که در این آزمایش به نمایش گذاشته شد و دیگر مراکز حمل و نقل منطقه مورد استفاده قرار خواهد گرفت.

کاربردهای تاکسیهای پرنده عمودپرواز برقی و تاثیر اقتصادی آنها
فناوری تاکسیهای پرنده عمودپرواز برقی پتانسیل تغییر حمل و نقل شهری را دارد و کاربردهایی را در رفت و آمد مسافران، گردشگری، تدارکات و خدمات اضطراری ارائه میدهد.
تاکسیهای پرنده عمودپرواز برقی در مقایسه با بالگردها این مزیت را دارند که به زیرساختهای حداقلی برای برخاستن و فرود نیاز دارند و در عین حال قابلیت کروز پرسرعت هواپیماهای سنتی را ارائه میدهند.
در عین حال، پیشرانههای الکتریکی آنها نویدبخش هزینههای عملیاتی کمتر و کاهش قابل توجه آلودگی صوتی و هوا است.
تیان یو میگوید: ما از نزدیک با مقامات منطقه برای پیشرفت به سمت مسیرهای تاکسیهای هوایی کاملاً عملیاتی در سراسر منطقه کار میکنیم.
این پرواز نمایشی همچنین توانایی اتوفلایت را در جهتیابی در فضای پیچیده و بسیار منظم هوایی و تضمین یکپارچگی ایمن در ساختارهای ترافیک هوایی موجود برجسته کرد.
این شرکت انتظار دارد طی حدود دو سال آتی مجوز حمل مسافر را برای پراسپریتی دریافت کند.
مخاطبان، نقشها و چالشهای مرتبط با طراحی و توسعه پرندههای عمودپرواز
منابع
J. Escareno, R.H. Stone, A. Sanchez and R. Lozano, “Modeling and Control Strategy for the Transition of a Convertible
Tail-sitter UAV”
Liu Zhong , He Yuqing , Yang Liying , Han Jianda “Control techniques of tilt rotor unmanned aerial vehicle systems
A review” CJA 733 (23 December 2016) Chinese Journal of Aeronautics, (2016)
Aswini kumar patra, Kandarp patel, Gourav singh and Vinay P, “Design And Development of Transition Autopilot For
VTOL UAV” Novateur Publications International Journal of Innovations in Engineering Research AND Technology
[IJIERT] ISSN: 2394-3696 VOLUME 4, ISSUE 6, June-2017
Chao Chen, Jiyang Zhang, Daibing Zhang and Lincheng Shen “Control and flight test of a tilt-rotor unmanned aerial
vehicle”, International Journal of Advanced Robotic Systems January-February 2017 1–12 The Author(s) 2017 DOI
10.1177/1729881416678141
WinKoKoOo, HlaMyoTun, Zaw Min Naing, Win Khine Moe, “Design Of Vertical Take-Off And Landing (VTOL)
Aircraft System”, INTERNATIONAL JOURNAL OF SCIENTIFIC & TECHNOLOGY
RESEARCH VOLUME ,
ISSUE 04, APRIL 2017
